
Point Cloud Generation and Classification
Embedded GPS coordinates were used to orient the exterior positions (EOs) of the images. A dense point cloud was generated from the EOs using autocorrelation. GCP targets were then measured providing an accurate ground truth. A macro was used to classify the raw points into model key points (MKP) for DTM generation. 
Digital Terrain Model (DTM) Generation
A series of data conversions (Figure 10) in ArcMap 10.2 produced a DTM from the MKP point cloud.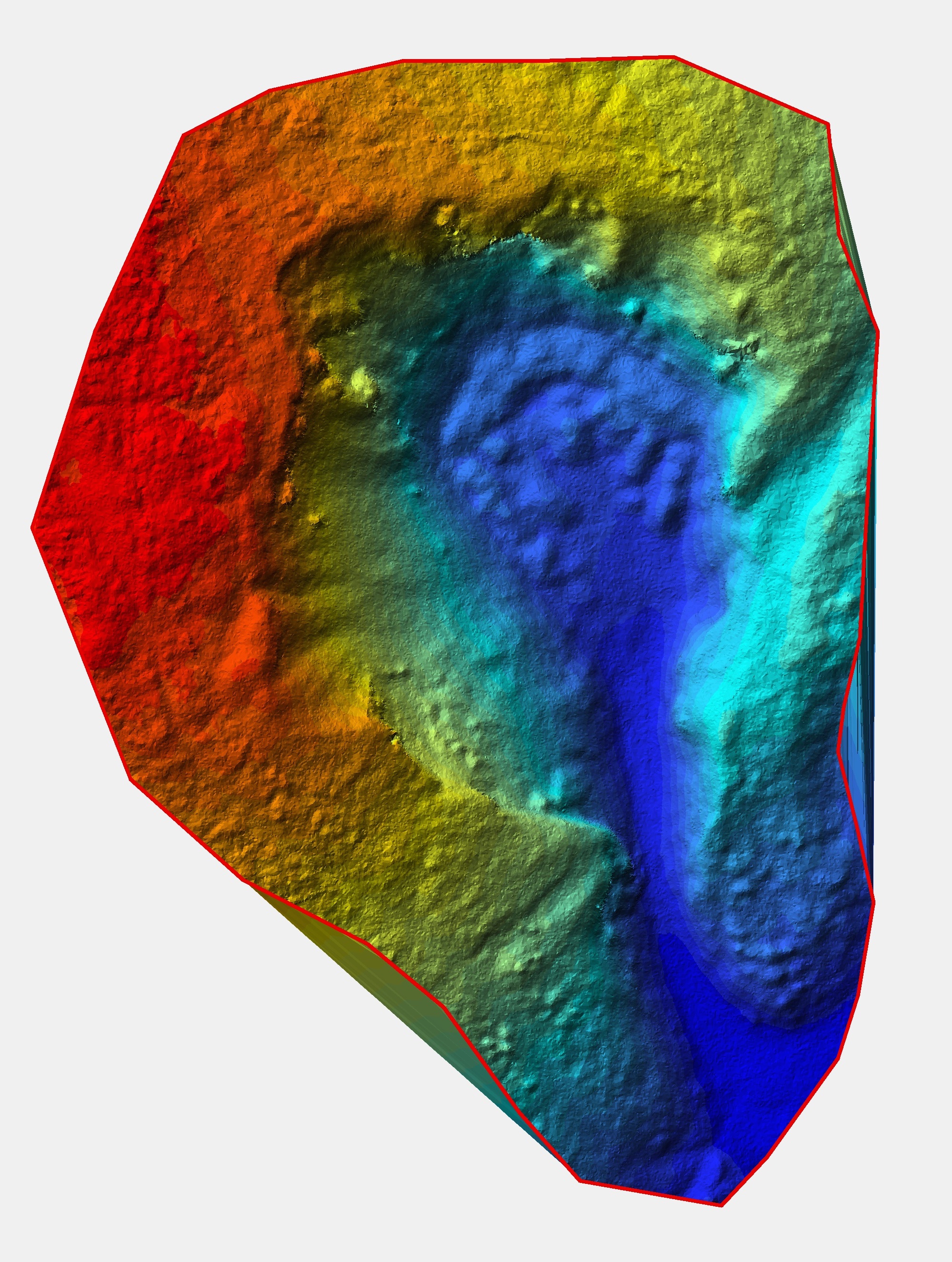
Orthophoto Mosaic Generation
Photoscan was used to generate the orthomosaic from the collaborative design activity (Collada) file (Figure 11). The full processing workflow is available below in Figure 12.
